財經中心/師瑞德報導
iRonCub3 是義大利科技研究院(IIT)最新打造的飛行人形機器人,外型如同5歲孩童,搭載四具微型噴射引擎,首次成功離地飛行。未來可應用於火災、洪水等災害現場,先飛抵災區、再徒步救援。研究團隊強調:「這不是玩笑,我們是認真想改變世界。」()
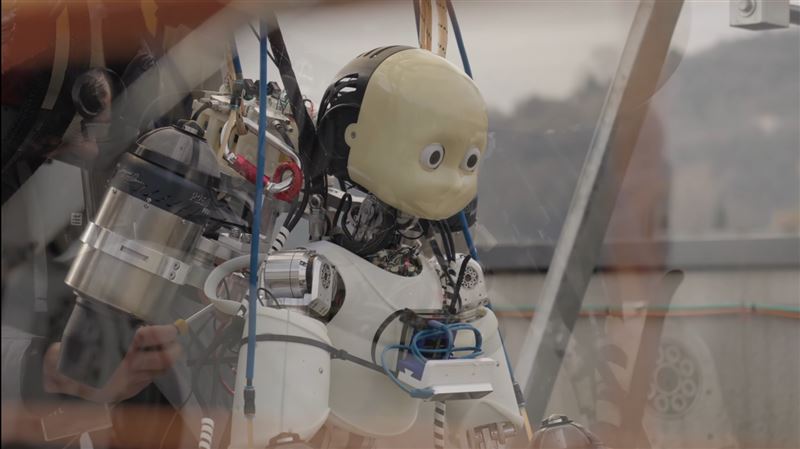
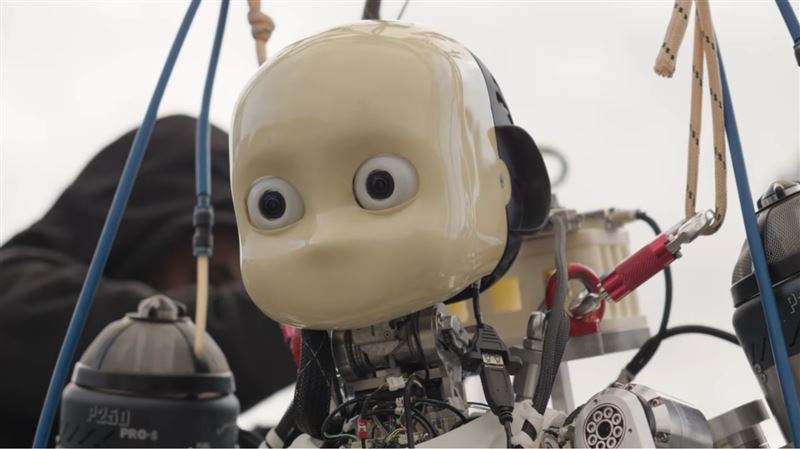
看過《室友梅根》嗎?電影中這位極度仿真的人形機器人與人類發生了很多精彩刺激的故事,根據外媒AOL報導,如今國外團隊正在研發一款飛天寶寶機器人,看著網路上公布的影片,彷彿《室友梅根》懷胎十月,有了寶寶,真實情況是,歷經近十年研發,由義大利技術研究院(IIT)人工與機械智慧實驗室團隊打造的飛行機器人 iRonCub3,近日成功完成首次穩定升空測試,實現人形機器人與噴射飛行系統結合的里程碑。
這款具備嬰兒面孔的人形機器人,其設計靈感源自 2004 年的 iCub 平台,機體高度與五歲兒童相仿,原本作為機器人學習和感知發展的研究平台,如今搭載四具微型噴射引擎,已能自主升空至 50 公分高度,並穩定懸停數秒。iRonCub3 的最終目標,是成為能在極端環境中提供即時支援的災難應變平台。
iRonCub3 專案主持人、IIT 機器人工程主任 Daniele Pucci 博士強調,此計畫不僅是炫技,背後更有實質的應用考量。他表示:「我們相信這個計畫的獨特性,我們正在探索的,是科學層面尚未開墾的野地。我們必須去嘗試,因為這可能會成為未來的重要方向。」
在災難發生現場,例如火災或水災,傳統地面機器人常因地形受限、路徑受阻而難以快速抵達現場。但具備飛行能力的 iRonCub3,則可迅速從空中降落至指定區域,並在著地後轉為徒步移動以節省能源,同時使用雙臂進行移除瓦礫、開啟門扉等任務。這種「空地混合」模式,將大幅提升災後機器人應用的實用性。
要讓一台人形機器人飛行並非易事。iRonCub3 背部與手臂共搭載四具小型渦輪噴射引擎,總推力超過1000牛頓。這些引擎需耗時加速至最大輸出,機體必須依靠自身姿態控制來調節推力分佈、保持穩定飛行。
「影片上看不見的是,這些渦輪的排氣溫度高達攝氏800度,氣流速度接近音速。」Pucci 指出,這樣的高溫高速氣流對機器人本體結構形成潛在威脅。「我們必須精準設計飛行軌跡,確保排氣噴流不會反向撞擊自身結構,這是極大的挑戰。」
為了解決這項難題,Pucci 團隊在今年 6 月於《Nature Engineering Communications》期刊發表研究,提出一種全新的空氣動力建模與控制技術,結合傳統控制理論與機器學習方法,為人形機器人導入「飛行力學」的可能性奠定基礎。
除了飛行本體的研發,iRonCub3 的相關控制演算法也正在延伸至其他領域。Pucci 分享一個近期突破:「我們與一間工業夾爪製造商合作時,發現氣壓夾爪的動力響應與噴射引擎非常相似。因此,我們直接沿用 iRonCub 的推力估測演算法,成功應用於夾爪控制。」
這類「技術外溢」正是高風險研究的潛在價值之一。Pucci 說:「一開始你做一件瘋狂的事,開發出一套全新工具與方法,結果這些工具能實際應用於工業界。這才是真正的創新驅動力。」
Pucci 強調,這樣的旗艦計畫除了技術價值外,更能為實驗室吸引優秀學生與研究人員。「這真的很酷,這一點不能否認。當你在做一個有點瘋、又很前沿的計畫時,整個團隊都會充滿能量與熱情。」他將這種氛圍與 DARPA 機器人大挑戰(DRC)與 DARPA 地下挑戰(SubT)相比,認為 iRonCub3 正是能讓下一代研究者愛上機器人的引爆點。
根據計畫藍圖,iRonCub 的下一階段將進一步提升飛行效率與機動性。Pucci 表示,團隊正開發具備額外自由度的新型噴射背包,可提升機體的偏航(yaw)控制能力,並考慮未來加裝機翼,以實現更長距離、低耗能的滑翔飛行。
但實驗條件將越來越嚴苛。iRonCub 目前的測試平台位於 IIT 大樓屋頂,未來若需進行大規模飛行測試,恐需與熱那亞機場進行協調,取得更大空域與飛行許可。
儘管挑戰重重,Pucci 表示他與團隊從未動搖。「這不是一場玩笑,而是一項我們真心相信的計畫。這是一項有可能寫入歷史、被後人記住的工作,而這種使命感,就是我們持續前行的最大動力。」